Celda de carga dimensional del sensor de fuerza de 6 ejes Sensor de torsión de seis ejes para robótica SERIE CZ-KWR63



● INTRODUCCIÓN DEL PRODUCTO
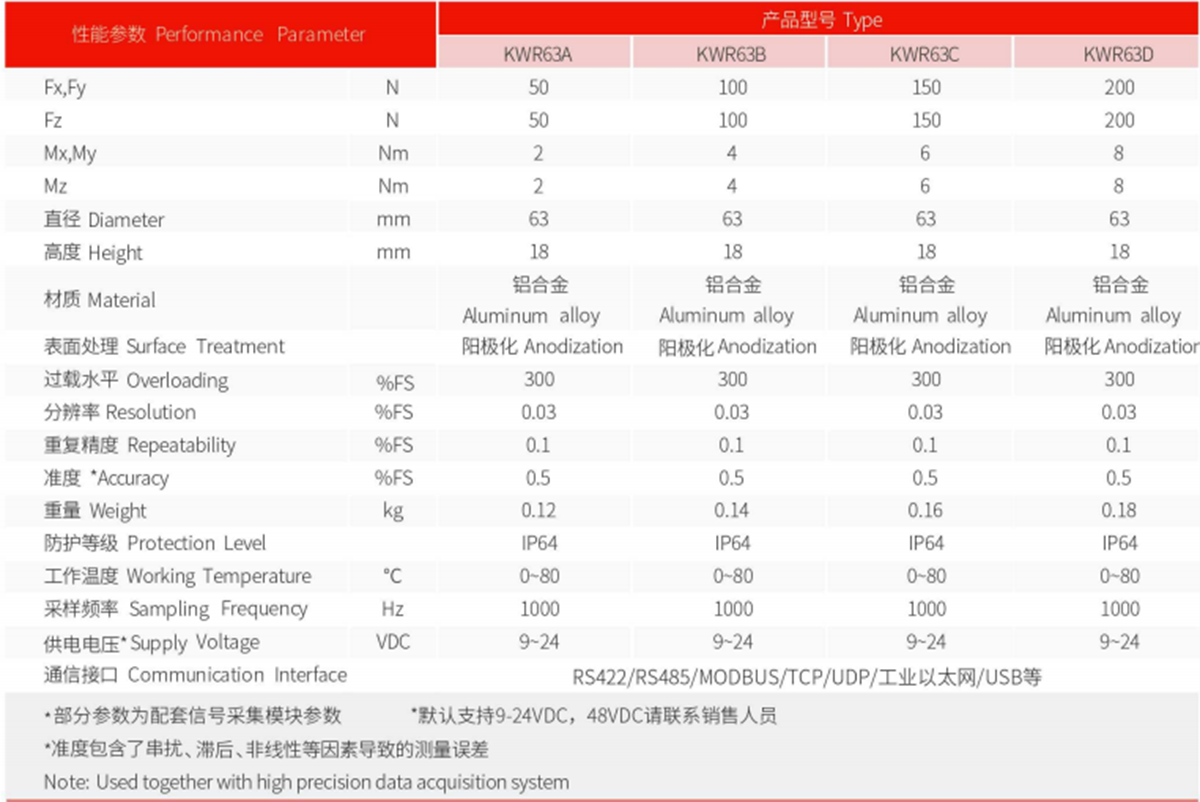
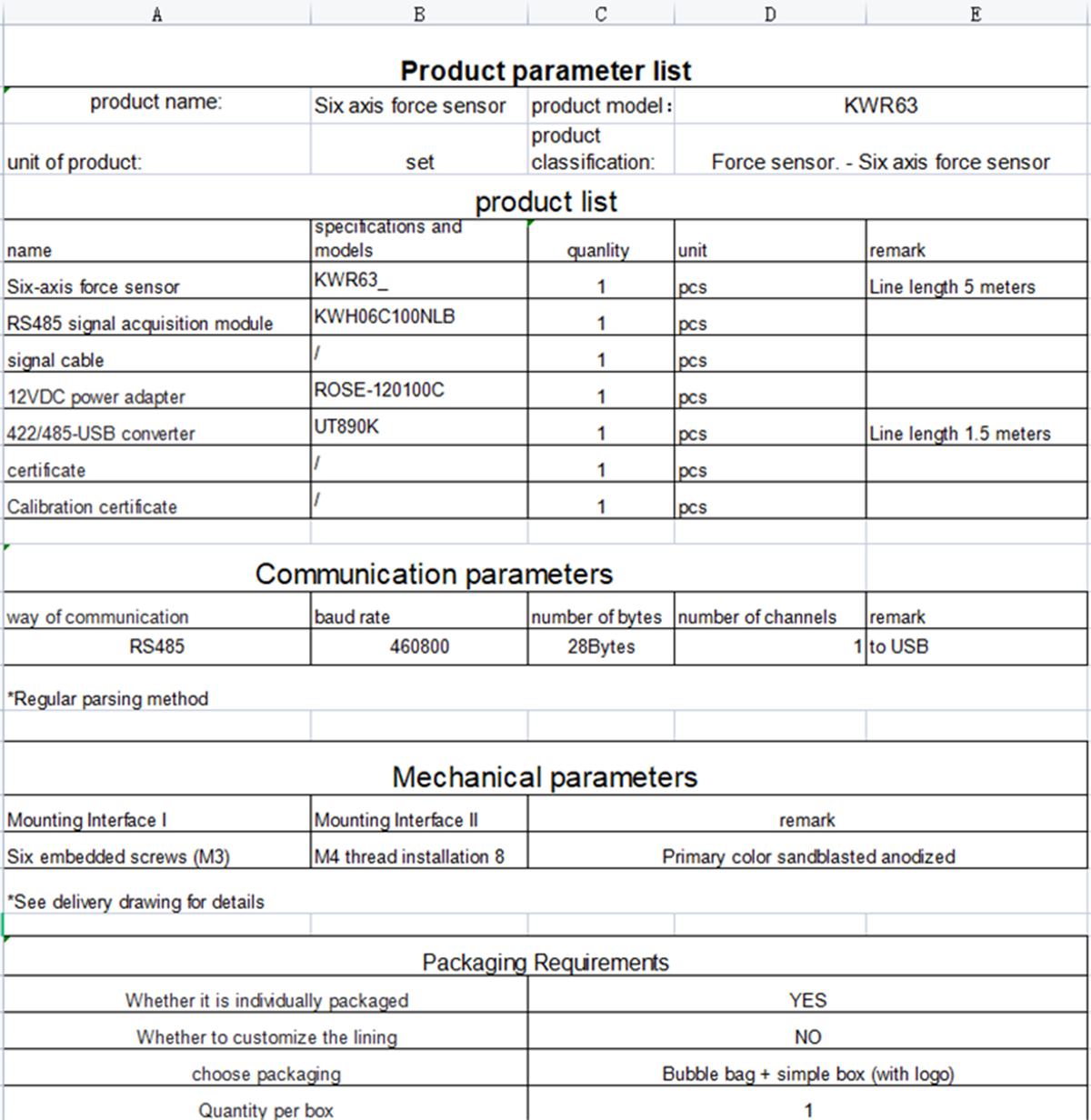
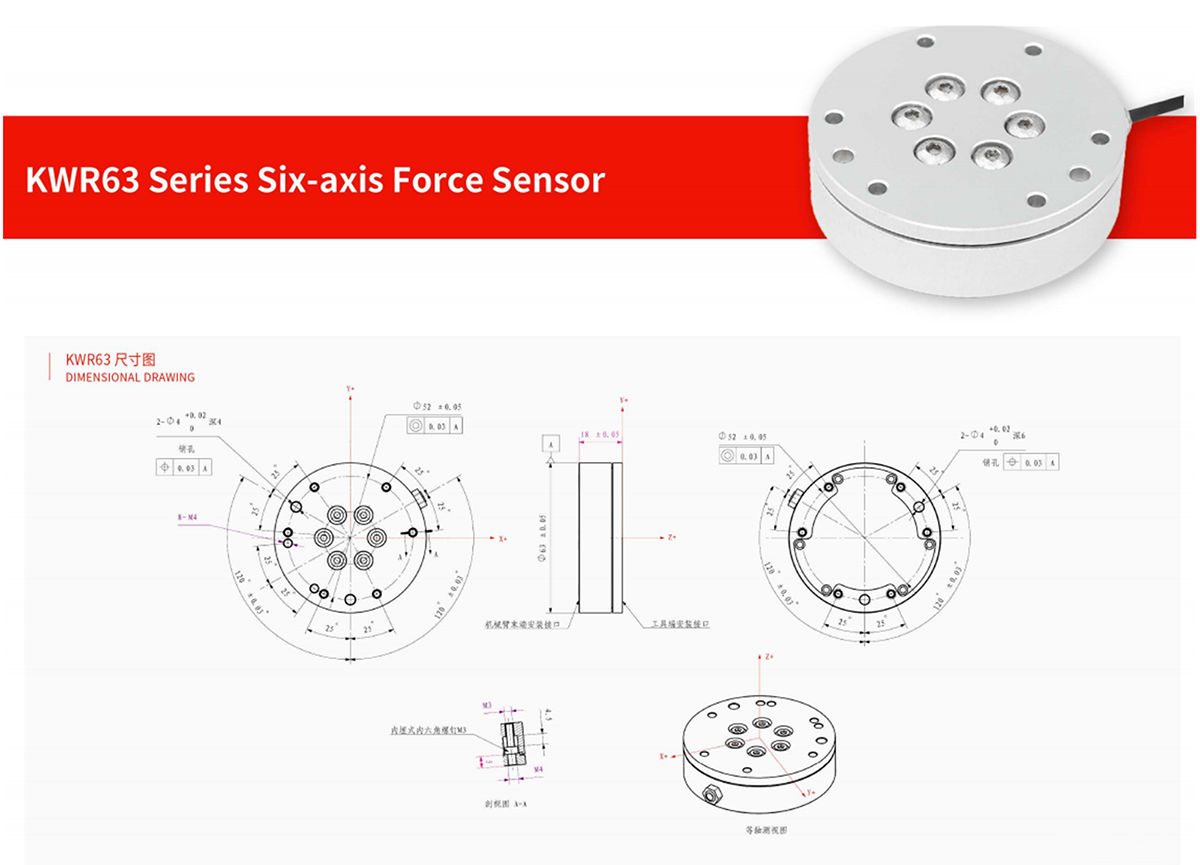
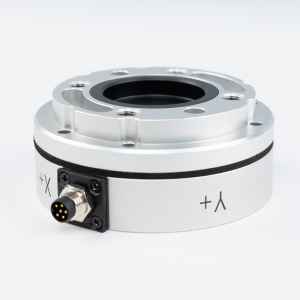
El sensor de fuerza de seis ejes de la serie KWR63 es un sensor de fuerza compacto de alta precisión con alta rigidez y sensibilidad y adopta una aleación aerodinámica.Puede medir fuerzas y pares en tres direcciones ortogonales en tiempo real.El sensor está diseñado según el principio de medición de tensión eléctrica y adopta la tecnología de calibración conjunta de seis ejes para mejorar la precisión.RS422, RS485, CAN, USB, Ethernet industrial y otros modos de comunicación se pueden realizar conectando diferentes módulos de adquisición de señales.Tiene un tamaño cercano al diámetro exterior del extremo de la mayoría de los robots cooperativos y se ha aplicado en investigación científica, detección automática, pruebas aeroespaciales y otros campos.
1. Calibración de la articulación de seis ejes, inhibe completamente la diafonía
2. Sensor de fuerza miniaturizado de seis ejes de alta precisión



Categorías de productos
-

Sensor de fuerza serie KWR200 para base de robot multi...
-

Un sensor de fuerza de seis dimensiones con una gran curva...
-

Mida la fuerza y el par en seis dimensiones Seis-...
-
Carga de seis dimensiones de 6 ejes de triple fuerza de 6 celdas...
-

Sensor de fuerza KWR90 para automatización industrial, r...
-

Carga dimensional del sensor de fuerza de 6 ejes Chengzhou...